
日本橋便りで伝えて欲しい内容がありましたら、希望テーマ(情報)を掲示板、メールなどで管理人までお知らせください。
出来る限り要望に答えたいと思います。(日本橋行きは毎月1回以上を考えていますので急な質問には答えかねますが)
随時、日本橋とは縁もゆかりもないテーマが時々登場しますが、お許しください。管理人の趣味的な内容の特集です。
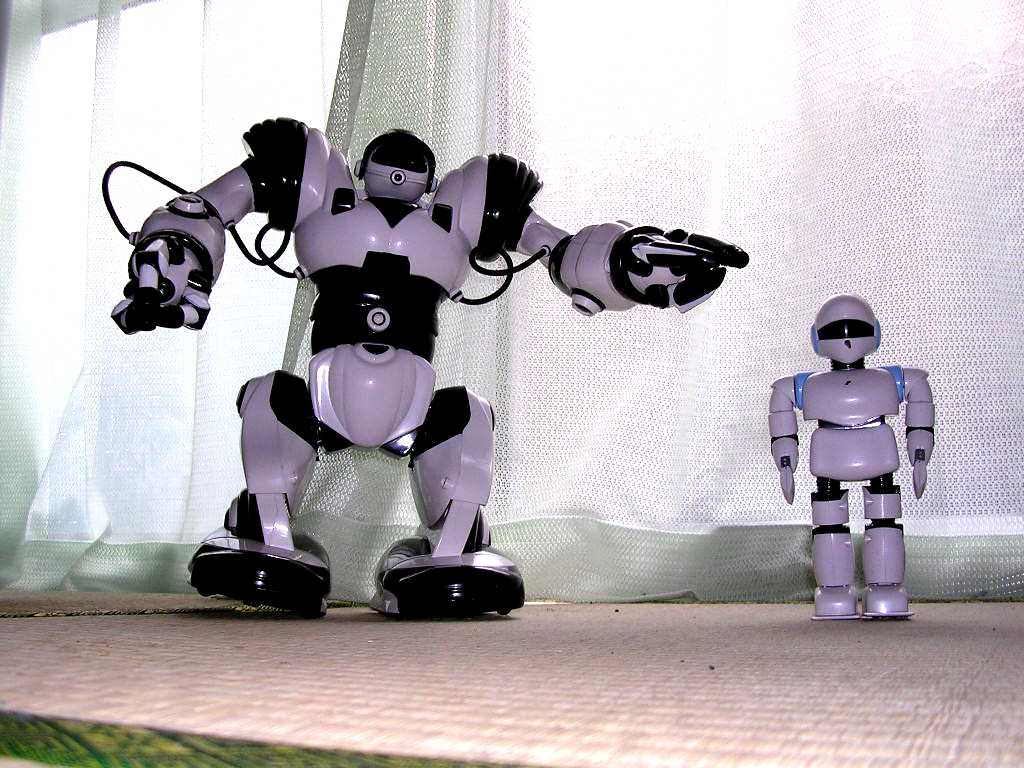
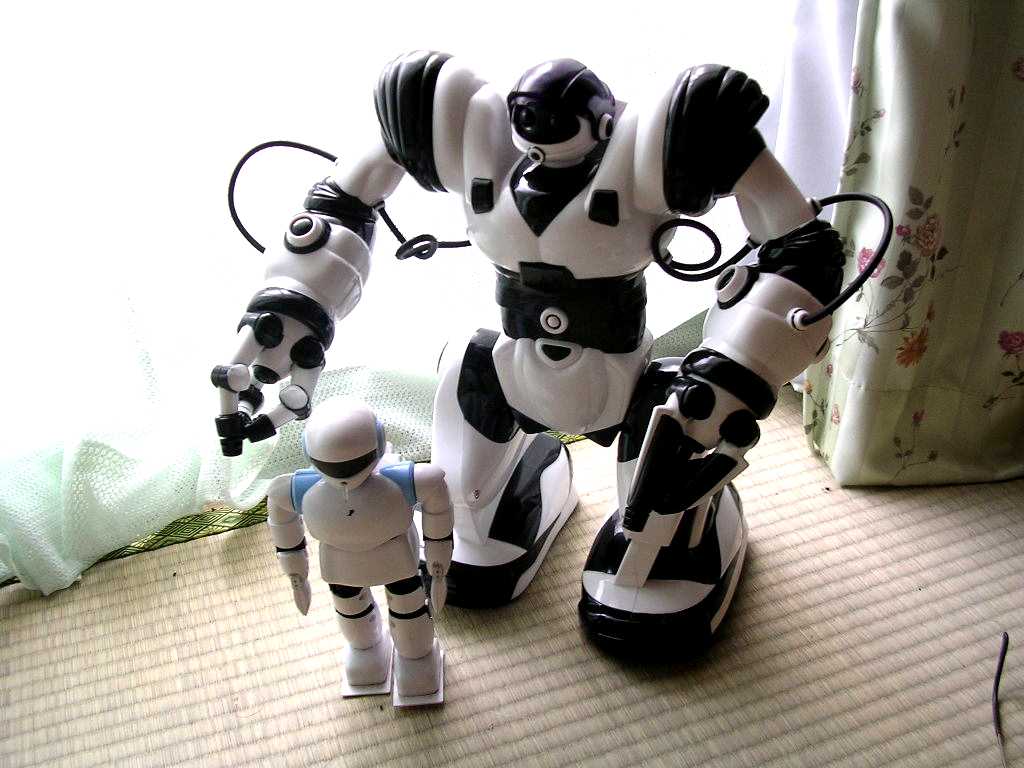
上の写真のロボット(左)は、2004年10月7日、神戸文化ホールで行われた第57回 音楽会の帰りに、 神戸ハーバーランドの「トイザラス」に寄りました。 そこで見つけたロボットが今回紹介する 「HUMA」 です。 前回紹介した 「ピノ」(右) の値段は800円だったのですが、 今回の 「HUMA」 は比較にならないくらいに高価な、12,999円 でした。 インターネットで検索してみると、日本での発売元 タカラ が最も詳しいようです。 2004年9月に発売されたばかりのようですが、
「HUMA」 の身長は34cmもあり 「ピノ」 の2倍近い大きなロボットです。 当然、前回紹介のおもちゃロボット「ピノ」 より機能は優れています。 関節の自由度は、足が2つ(脚部、膝部)、腕が3つ(肩部、腕部、手部)、胴体に1つ(腰部)の自由度を持つ計11自由度のロボットです。 足の関節は連動式で、モーターは片足毎独立で1つずつ。 腕部は左右独立に肩部、腕部は2モーターで回転。手部は開閉制御です。 腰部は重心移動のためのようで左右に曲げるためのもので、モーター1つとなっています。 したがって、7つのモーターで動かせるようです(分解していないので詳細は現在では不明ですが)。 このロボットは、完全な2足歩行が出来る(摺り足でなく歩ける)ロボットで、 赤外線リモコンで操縦できるるものです。 また、各動作を組み合わせて動かせる方式(プログラム方式)も可能です。 両手指先、両足にそれぞれ前後(計6個)の接触センサー、胴体部にソニックセンサー(音センサー)も備わっており、 センサー駆動のプログラムも可能です。 左右それぞれの足の前後にスイッチが1つずつあり、スイッチ部分に接触したときの動作を設定できます。 詳しい情報は robosapienonline.com をどうぞ。動画もあります。
このロボットを始めて知ったのは、インターネットで1年ほど前だったように記憶しています。 これだけの自由度を持つ「おもちゃロボット」は初めてで、当時話題になり、筆者(志)も欲しかったのですが、 それ以上の行動は取りませんでした。当時はアメリカで発売されるとの話だったからです。
そのようないきさつもあった中で、音楽会の帰りに別の用事でハーバーランドに寄ったとき、 ハーバーサーカスのトイザラスの店頭で「HUMA」を偶然に見つけたのです。 13,000円だったので、即購入となったわけです。 一般のロボットでは、ラジコンなどで使われる「プロポ」が関節部などに使われます。 プロポが使われる理由には、歯車などを使わないためコントロール部分の設計が容易になるからですが、 コスト的には相当高くなります。モーター駆動方式が最も低コストなのですが、 位置決めなどの難しさ、歯車などのメカ部分が複雑になるなど欠点もあります。 今回の「HUMA」はコスト的には「プロポ」使用が難しいのでモータ直接駆動と考えています(分解しないと分からないのですが)。 モータ駆動のノウハウをこの「HUMA」を分解することで修得できるかもしれません。 これは楽しみです。
次回は、「HUMA」を動かしてみての報告です。ご期待ください。
 へ
へこのページは、2004/01/26 に始まりました。