
日本橋便りで伝えて欲しい内容がありましたら、希望テーマ(情報)を掲示板、メールなどで管理人までお知らせください。
出来る限り要望に答えたいと思います。(日本橋行きは毎月1回以上を考えていますので急な質問には答えかねますが)
随時、日本橋とは縁もゆかりもないテーマが時々登場しますが、お許しください。管理人の趣味的な内容の特集です。
「HUMA」本体の駆動用電池は単一乾電池4本です。 単一乾電池の手持ちがなく、11日に馴染みの100円ショップへ行きました。 店頭で見つけた単一乾電池は、4本セットで100円(税込)とびっくりする値段でした。 1セットで100円ですので、2セット分を購入してしまいました。 急いで帰宅して「HUMA」本体を箱から取り出し、逆さにして電池を入れることにしました。 足の裏に電池ボックスがあるからです。 電池ボックスのふたはプラスネジ2本でがっちりと固定されています。 これを外すためプラスドライバーが必要なのです。 「なんと不便な設計!」 と、別室にある工具箱を取りに行かなければならなかったのです。 ドライバーを使って、ネジを外し両足の電池ボックスに計4本の単一電池を入れてやりました。 本体の電池はこれでOKです。
次に、コントローラの電池ですが、これまたネジ止めになっています。 これも電池交換にドライバーが必要だったのです。 コントローラー用の電池は、単四電池3本です。これもまた、100均アルカリ乾電池を使いました。 「HUMA」本体の場合、動くときの衝撃により電池のふたが取れないという配慮でネジ止めされていると考えると分からなくはないのです。 しかし、コントローラには衝撃はかかりません。 ネジ止めするほどのことはないと思うのですが、理由はなんでしょうか?
合計5本のネジを外したり止めたりする電池装着作業に結構時間が掛かりました。 さて、ロボサピアン「HUMA」の起動スイッチですが、それは本体背中にある電源スイッチです。 起動スイッチを押すと、アッと驚くことが「HUMA」に起こったのです。
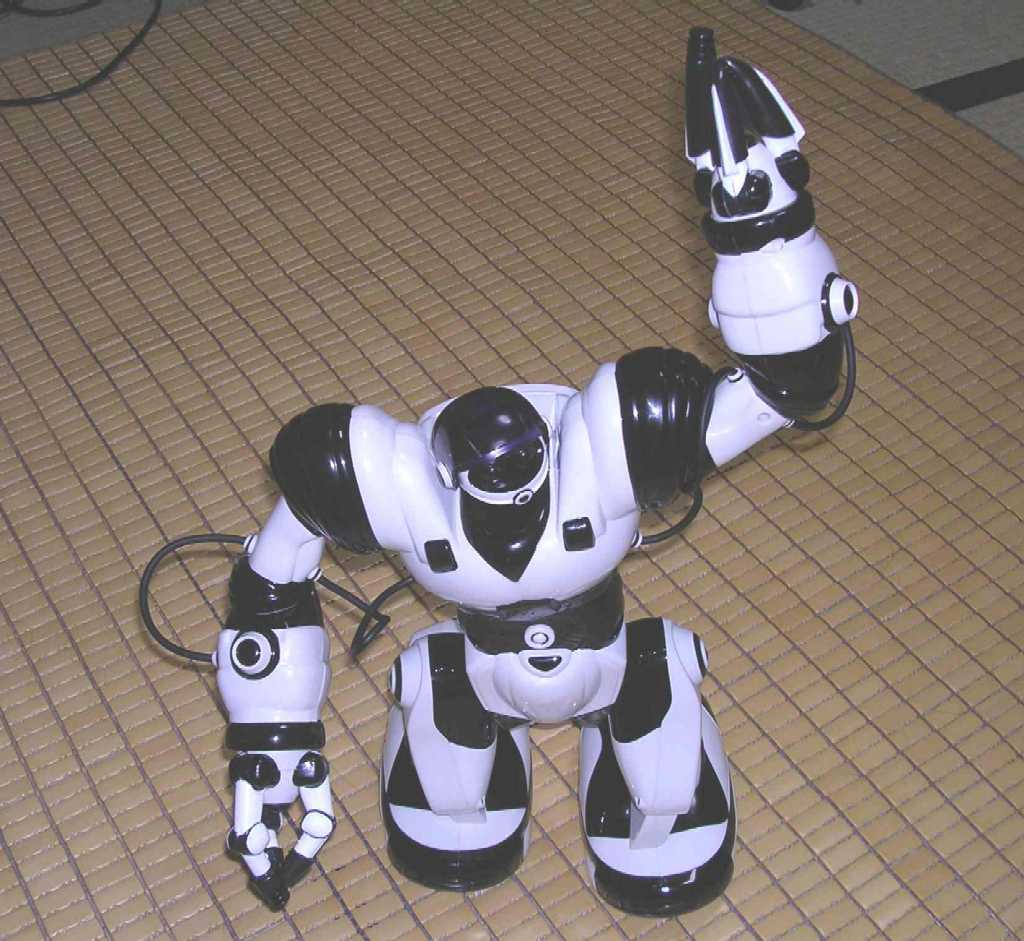
スイッチONと共に、「HUMA」は、筆者(志)の手を振り払うように、大アクビをし、動き出したのです。 両手を挙げて、それも大きな声を出しながら体を伸ばしたのです。その後、体を軽く一通り動かし、起立姿勢で静止します。 この起動時の「HUMA」の動きはユニークで、設計した人の 「ユーモア+技術力」 を見たのです。
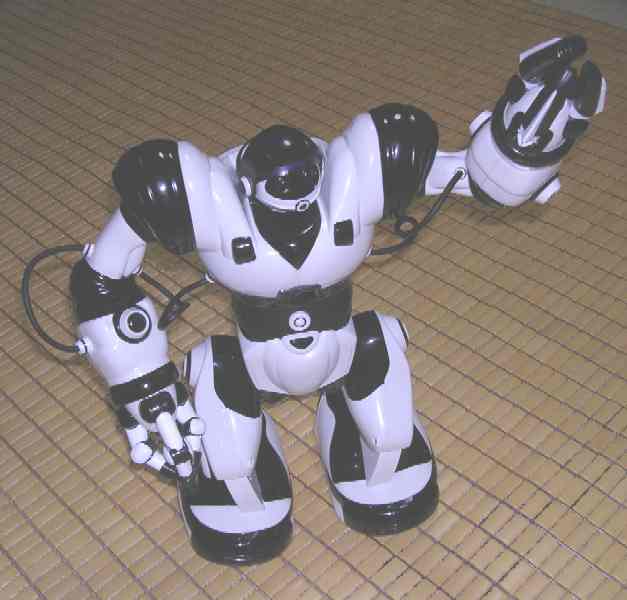
単機能コントロールでは、腕を上げ下げ、手首を回す、手を開閉する、体を左右に傾ける。 その場で足踏みする、前後に歩く、その場で左右に方向転換するなどいろいろな機能がありました。 コントローラーが自由に使えるようになると非常に面白そうですが、現在は自由に動かすには程遠い状態でした。
単機能コントロールでの操縦能力が筆者(志)にはまだ無いので、簡単な動作として、歩行を試してみました。 歩く姿は非常にダイナミックなもので、体を左右に大きく揺すり、完全2足歩行するのです。 足踏みしながらその場で方向転換などもできるし、後ずさりもできます。 歩行だけなら直ぐにコントローラーで誰でも操縦できるようです。 それにしても見事というほかありません。1万円ちょっとのおもちゃとは思えないほどの性能です。
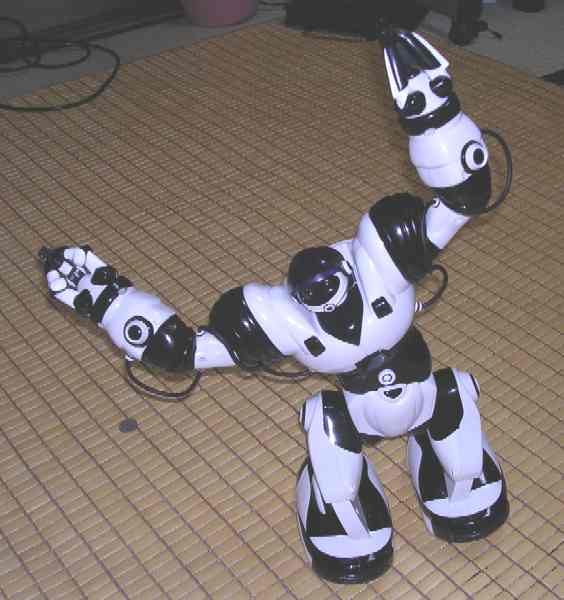
コントローラーの使い方に慣れていない現状では、複雑な「HUMA」の動作は不可能です。 どの程度の機能が「HUMA」に備わっているのか分かりません。 そこで、コントローラーを「デモ機能」に切替えて「HUMA」を動かしてみることにしました。 デモ機能は事前にプログラムされた連続動作を行なわせる機能です。 片手を上げて声を出しながら挨拶をする。両腕を上げて格好をつけるなど、複雑な動きも沢山組み込まれているようです。 音楽を演奏しながら、声を出しながらダンスをするなどは壮観です。 動画にして紹介したいところですが、サイトの容量が限られるので...(ハーバーランド・トイザラスでご覧下さい)


「HUMA」購入の目的は、そのメカニズムを見ることでした。 分解して構造を分析することを考えていたのですが、解体を少し伸ばして、しばらくは遊んでやることにしました。
次回は、東京・秋葉原の「秋月電子」で購入した「加速度センサー・キット」の製作とそのセンサー作動実験の報告です。 ロボットの姿勢制御のための加速度センサーですので、重要なユニット(姿勢制御用)であることは間違いありません。 どの程度の性能があるセンサーなのかを確かめる必要があるのです。
 へ
へこのページは、2004/01/26 に始まりました。